Position Based Dynamics
Last Update:August 30, 2025 pm
Algorithm
The dynamics of an object can be described by $n$ vertices and $M$ constraints on vertex position. The mass, position and velocity of the $i$-th vertex are denoted as respectively. The $j$-th constraint may be an equality or inequality, written as
We use the symbol $\succ$ to denote $=$ or $\ge$ and let . Then the $j$-th constraint is denoted as .
Position based dynamics can be abbreviated as PBD. The algorithm first calculates the initial predicted position of each vertex , and then try to move to satisfy all the constraints
The specific algorithm of PBD can be represented by the following pseudo code.
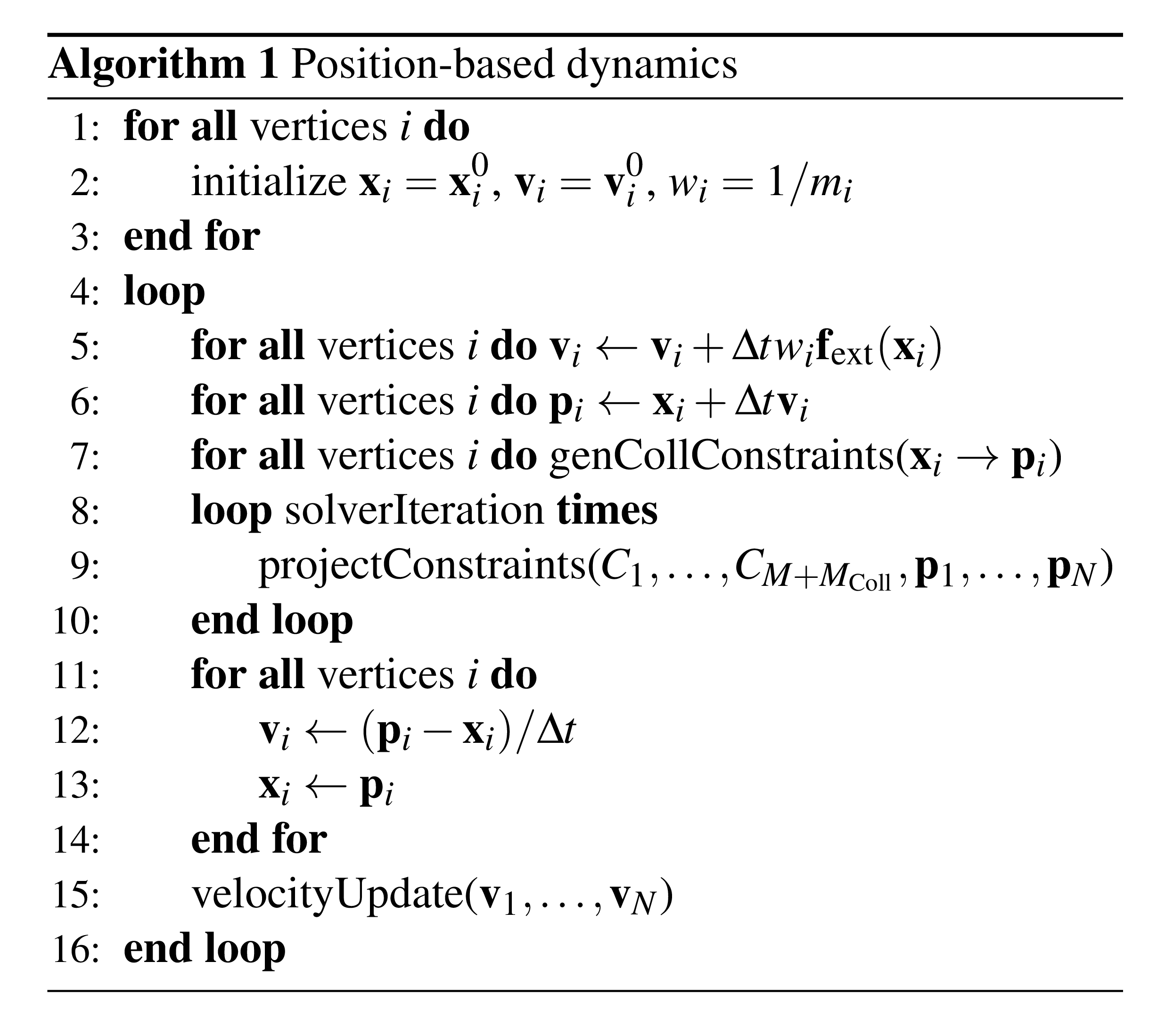
Solver
In the PBD pseudocode, lines 8 to 10 are the iterative solver. Here, the function
is a nonlinear Gauss-Seidel solver for the system of equations/inequalities
The solver will linearize and solve each constraint in turn. Each time a constraint is solved, the solver will immediately update the values of to affect the solution of . Below we will specifically introduce the solution method for .
If the constraint is an equation, we want to find a such that , where . Linearizing it to the first order, we get
The above equation generally has infinitely many solutions. If we restrict the solution to be in the direction of
that is, let
we can obtain a particular solution
The solution method for is to update the original with . Therefore, the function can be represented in pseudocode as follows

Specific constraints
Stretch
The stretch constraint is
where $d$ represents the initial length. The gradient is calculated as
Thus
SDF Collision
The SDF collision constraint is
The correction term is
Example:SDF collision for sphere
Given a sphere with radius $r$, its SDF collision constraint is
The correction term is
The calculation of numerical integral
We can use the tetrahedron technique to optimize the calculation of numerical differentiation of SDF. Let
Consider the sum
From this we can get
Copyright Notice: All articles in this blog are licensed under CC BY-SA 4.0 unless declaring additionally.